-
7. 채널 정보 출력(CAN_FD)C#/XL_Driver 2020. 2. 10. 17:14
CAN_FD의 채널 정보를 포함하는 class 구조는 다음과 같습니다
public class xl_channel_config { public string name; public string transceiverName; public uint articleNumber; public uint serialNumber; public uint[] raw_data; public XLDefine.XL_InterfaceVersion interfaceVersion; public uint driverVersion; public xl_bus_params busParams; public XLDefine.XL_BusTypes connectedBusType; public uint[] reserved; public byte isOnBus; public XLDefine.XL_ChannelCapabilities channelCapabilities; public ulong channelMask; public byte channelIndex; public XLDefine.XL_Transceiver_Status transceiverState; public XLDefine.XL_Transceiver_Types transceiverType; public byte hwChannel; public byte hwIndex; public XLDefine.XL_HardwareType hwType; public XLDefine.XL_BusCapabilities channelBusCapabilities; public xl_channel_config(); }이들 중, define, class 혹은 struct, 배열 자료형을 제외한 나머지 값들을 출력하면 다음과 같다
※ 참고 : 연결된 장치는 VN1630A와 VN1640A 각 1개씩 입니다.
출력 결과
------------------------------------------------------------------- xlCANFDdemo.NET C# V11.0 Copyright (c) 2019 by Vector Informatik GmbH. All rights reserved. ------------------------------------------------------------------- vxlapi_NET : 11.0.14.22309 Open Driver : XL_SUCCESS Get Driver Config : XL_SUCCESS DLL Version : 11.0.14 Channels found : 12 [0] VN1630A Channel 1 - CAN FD Support : yes - Name : VN1630A Channel 1 - Transciver Name : CANpiggy 1055cap (Lowspeed) - Article Number : 7113 - Serial Number : 540600 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 1 - Channel Index : 0 - Hw Channel : 0 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1630 [1] VN1630A Channel 2 - CAN FD Support : yes - Name : VN1630A Channel 2 - Transciver Name : On board CAN 1051cap(Highspeed) - Article Number : 7113 - Serial Number : 540600 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 2 - Channel Index : 1 - Hw Channel : 1 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1630 [2] VN1630A Channel 3 - CAN FD Support : yes - Name : VN1630A Channel 3 - Transciver Name : On board CAN 1051cap(Highspeed) - Article Number : 7113 - Serial Number : 540600 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 4 - Channel Index : 2 - Hw Channel : 2 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1630 [3] VN1630A Channel 4 - CAN FD Support : no - Name : VN1630A Channel 4 - Transciver Name : - Article Number : 7113 - Serial Number : 540600 - Interface Version : 0 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 1073741831 - Channel Mask : 8 - Channel Index : 3 - Hw Channel : 3 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1630 [4] VN1630A Channel 5 - CAN FD Support : no - Name : VN1630A Channel 5 - Transciver Name : On board D/A IO 1021 - Article Number : 7113 - Serial Number : 540600 - Interface Version : XL_INTERFACE_VERSION_V3 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 1073774599 - Channel Mask : 16 - Channel Index : 4 - Hw Channel : 4 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1630 [5] VN1640A Channel 1 - CAN FD Support : yes - Name : VN1640A Channel 1 - Transciver Name : CANpiggy 1057Gcap (Highspeed) - Article Number : 7114 - Serial Number : 26638 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 32 - Channel Index : 5 - Hw Channel : 0 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1640 [6] VN1640A Channel 2 - CAN FD Support : yes - Name : VN1640A Channel 2 - Transciver Name : CANpiggy 1057Gcap (Highspeed) - Article Number : 7114 - Serial Number : 26638 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 64 - Channel Index : 6 - Hw Channel : 1 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1640 [7] VN1640A Channel 3 - CAN FD Support : yes - Name : VN1640A Channel 3 - Transciver Name : CANpiggy 1057Gcap (Highspeed) - Article Number : 7114 - Serial Number : 26638 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 128 - Channel Index : 7 - Hw Channel : 2 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1640 [8] VN1640A Channel 4 - CAN FD Support : yes - Name : VN1640A Channel 4 - Transciver Name : CANpiggy 1057Gcap (Highspeed) - Article Number : 7114 - Serial Number : 26638 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 3791683607 - Channel Mask : 256 - Channel Index : 8 - Hw Channel : 3 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1640 [9] VN1640A Channel 5 - CAN FD Support : no - Name : VN1640A Channel 5 - Transciver Name : On board D/A IO 1021 - Article Number : 7114 - Serial Number : 26638 - Interface Version : XL_INTERFACE_VERSION_V3 - Driver Version : 168361996 - isOnBus : 0 - Capabilities : 1073774599 - Channel Mask : 512 - Channel Index : 9 - Hw Channel : 4 - Hw Index : 0 - Hw Type : XL_HWTYPE_VN1640 [10] Virtual Channel 1 - CAN FD Support : yes - Name : Virtual Channel 1 - Transciver Name : Virtual CAN - Article Number : 0 - Serial Number : 0 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 184680464 - isOnBus : 0 - Capabilities : 2684354567 - Channel Mask : 1024 - Channel Index : 10 - Hw Channel : 0 - Hw Index : 0 - Hw Type : XL_HWTYPE_VIRTUAL [11] Virtual Channel 2 - CAN FD Support : yes - Name : Virtual Channel 2 - Transciver Name : Virtual CAN - Article Number : 0 - Serial Number : 0 - Interface Version : XL_INTERFACE_VERSION_V4 - Driver Version : 184680464 - isOnBus : 0 - Capabilities : 2684354567 - Channel Mask : 2048 - Channel Index : 11 - Hw Channel : 1 - Hw Index : 0 - Hw Type : XL_HWTYPE_VIRTUAL APPLICATION CONFIGURATION ------------------------------------------------------------------- Configured Hardware Channel : VN1640A Channel 2 Hardware Driver Version : 10.9.12 Used Transceiver : CANpiggy 1057Gcap (Highspeed) ------------------------------------------------------------------- Configured Hardware Channel : VN1630A Channel 2 Hardware Driver Version : 10.9.12 Used Transceiver : On board CAN 1051cap(Highspeed) ------------------------------------------------------------------- Open Port : XL_SUCCESS Set CAN FD Config : XL_SUCCESS Set Notification : XL_SUCCESS Activate Channel : XL_SUCCESS demoToggleTimerRate, xlSetTimerRate (timerRate:100000) result: XL_SUCCESS CAN FD mode : ISO TX Arb. BitRate : 1000000Bd, Data Bitrate: 2000000Bd Start Rx thread... Press <ENTER> to transmit CAN messages <b>, <ENTER> to block Rx thread for rx-overrun-test <B>, <ENTER> burst of CAN TX messages <x>, <ENTER> to exit위 출력 결과의 소스코드와 설정, 실행 환경은 다음과 같습니다.
/*------------------------------------------------------------------------------------------- | File : Class1.cs | Project : Vector CAN FD .NET Example | | Description : This example demonstrates the basic CAN FD functionality of the XL.NET Driver Library |-------------------------------------------------------------------------------------------- | Copyright (c) 2019 by Vector Informatik GmbH. All rights reserved. |-------------------------------------------------------------------------------------------*/ using System; using System.Runtime.InteropServices; using System.Threading; using vxlapi_NET; namespace xlCANDemo { /// <summary> /// Summary description for Class1. /// </summary> class Class1 { // ----------------------------------------------------------------------------------------------- // DLL Import for RX events // ----------------------------------------------------------------------------------------------- [DllImport("kernel32.dll", SetLastError = true)] static extern int WaitForSingleObject(int handle, int timeOut); // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- // Global variables // ----------------------------------------------------------------------------------------------- // Driver access through XLDriver (wrapper) private static XLDriver CANDemo = new XLDriver(); private static String appName = "xlCANdemoNET"; // Driver configuration private static XLClass.xl_driver_config driverConfig = new XLClass.xl_driver_config(); // Variables required by XLDriver private static XLDefine.XL_HardwareType hwType = XLDefine.XL_HardwareType.XL_HWTYPE_NONE; private static uint hwIndex = 0; private static uint hwChannel = 0; private static int portHandle = -1; private static int eventHandle = -1; private static UInt64 accessMask = 0; private static UInt64 permissionMask = 0; private static UInt64 txMask = 0; private static UInt64 rxMask = 0; private static int txCi = 0; private static int rxCi = 0; private static uint canFdModeNoIso = 0; // Global CAN FD ISO (default) / no ISO mode flag // RX thread private static Thread rxThread; private static bool blockRxThread = false; // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// MAIN /// /// Sends and receives CAN FD messages using main methods of the "XLDriver" class. /// This demo requires two connected CAN channels (Vector network interface). /// The configuration is read from Vector Hardware Config (vcanconf.exe). /// </summary> // ----------------------------------------------------------------------------------------------- [STAThread] static int Main(string[] args) { XLDefine.XL_Status status; Console.WriteLine("-------------------------------------------------------------------"); Console.WriteLine(" xlCANFDdemo.NET C# V11.0 "); Console.WriteLine("Copyright (c) 2019 by Vector Informatik GmbH. All rights reserved."); Console.WriteLine("-------------------------------------------------------------------\n"); // print .NET wrapper version Console.WriteLine("vxlapi_NET : " + typeof(XLDriver).Assembly.GetName().Version); // Open XL Driver status = CANDemo.XL_OpenDriver(); Console.WriteLine("Open Driver : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // Get XL Driver configuration status = CANDemo.XL_GetDriverConfig(ref driverConfig); Console.WriteLine("Get Driver Config : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // Convert the dll version number into a readable string Console.WriteLine("DLL Version : " + CANDemo.VersionToString(driverConfig.dllVersion)); // Display channel count Console.WriteLine("Channels found : " + driverConfig.channelCount); // Display all found channels for (int i = 0; i < driverConfig.channelCount; i++) { Console.WriteLine("\n [{0}] " + driverConfig.channel[i].name, i); if ((driverConfig.channel[i].channelCapabilities & XLDefine.XL_ChannelCapabilities.XL_CHANNEL_FLAG_CANFD_ISO_SUPPORT) == XLDefine.XL_ChannelCapabilities.XL_CHANNEL_FLAG_CANFD_ISO_SUPPORT) Console.WriteLine(" - CAN FD Support : yes"); else Console.WriteLine(" - CAN FD Support : no"); Console.WriteLine(" - Name : " + driverConfig.channel[i].name); Console.WriteLine(" - Transciver Name : " + driverConfig.channel[i].transceiverName); Console.WriteLine(" - Article Number : " + driverConfig.channel[i].articleNumber); Console.WriteLine(" - Serial Number : " + driverConfig.channel[i].serialNumber); Console.WriteLine(" - Interface Version : " + driverConfig.channel[i].interfaceVersion); Console.WriteLine(" - Driver Version : " + driverConfig.channel[i].driverVersion); Console.WriteLine(" - isOnBus : " + driverConfig.channel[i].isOnBus); Console.WriteLine(" - Capabilities : " + driverConfig.channel[i].channelCapabilities); Console.WriteLine(" - Channel Mask : " + driverConfig.channel[i].channelMask); Console.WriteLine(" - Channel Index : " + driverConfig.channel[i].channelIndex); Console.WriteLine(" - Hw Channel : " + driverConfig.channel[i].hwChannel); Console.WriteLine(" - Hw Index : " + driverConfig.channel[i].hwIndex); Console.WriteLine(" - Hw Type : " + driverConfig.channel[i].hwType); } // If the application name cannot be found in VCANCONF... if ((CANDemo.XL_GetApplConfig(appName, 0, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN) != XLDefine.XL_Status.XL_SUCCESS) || (CANDemo.XL_GetApplConfig(appName, 1, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN) != XLDefine.XL_Status.XL_SUCCESS)) { //...create the item with two CAN channels CANDemo.XL_SetApplConfig(appName, 0, XLDefine.XL_HardwareType.XL_HWTYPE_NONE, 0, 0, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN); CANDemo.XL_SetApplConfig(appName, 1, XLDefine.XL_HardwareType.XL_HWTYPE_NONE, 0, 0, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN); PrintAssignErrorAndPopupHwConf(); } // Request the user to assign channels until both CAN1 (Tx) and CAN2 (Rx) are assigned to usable channels while (!GetAppChannelAndTestIsOk(0, ref txMask, ref txCi) || !GetAppChannelAndTestIsOk(1, ref rxMask, ref rxCi)) { PrintAssignErrorAndPopupHwConf(); } PrintConfig(); accessMask = txMask | rxMask; permissionMask = accessMask; // -------------------- // Open port // -------------------- status = CANDemo.XL_OpenPort(ref portHandle, appName, accessMask, ref permissionMask, 16000, XLDefine.XL_InterfaceVersion.XL_INTERFACE_VERSION_V4, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN); Console.WriteLine("\n\nOpen Port : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // -------------------- // Set CAN FD config // -------------------- XLClass.XLcanFdConf canFdConf = new XLClass.XLcanFdConf(); // arbitration bitrate canFdConf.arbitrationBitRate = 1000000; canFdConf.tseg1Abr = 6; canFdConf.tseg2Abr = 3; canFdConf.sjwAbr = 2; // data bitrate canFdConf.dataBitRate = canFdConf.arbitrationBitRate * 2; canFdConf.tseg1Dbr = 6; canFdConf.tseg2Dbr = 3; canFdConf.sjwDbr = 2; if (canFdModeNoIso > 0) { canFdConf.options = (byte)XLDefine.XL_CANFD_ConfigOptions.XL_CANFD_CONFOPT_NO_ISO; } else { canFdConf.options = 0; } status = CANDemo.XL_CanFdSetConfiguration(portHandle, accessMask, canFdConf); Console.WriteLine("\n\nSet CAN FD Config : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // Get RX event handle status = CANDemo.XL_SetNotification(portHandle, ref eventHandle, 1); Console.WriteLine("Set Notification : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // Activate channel - with reset clock status = CANDemo.XL_ActivateChannel(portHandle, accessMask, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN, XLDefine.XL_AC_Flags.XL_ACTIVATE_RESET_CLOCK); Console.WriteLine("Activate Channel : " + status); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); uint timer = 100000; //status = CANDemo.XL_SetTimerRate(portHandle, timer); //Console.WriteLine("Timer Set : " + status); //if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); // Get XL Driver configuration to get the actual setup parameter status = CANDemo.XL_GetDriverConfig(ref driverConfig); Console.WriteLine("demoToggleTimerRate, xlSetTimerRate (timerRate:{0}) result: {1}", timer, CANDemo.XL_GetErrorString(status)); if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError(); if (canFdModeNoIso > 0) { Console.WriteLine("CAN FD mode : NO ISO"); } else { Console.WriteLine("CAN FD mode : ISO"); } Console.WriteLine("TX Arb. BitRate : " + driverConfig.channel[txCi].busParams.dataCanFd.arbitrationBitRate + "Bd, Data Bitrate: " + driverConfig.channel[txCi].busParams.dataCanFd.dataBitRate + "Bd"); // Run Rx thread Console.WriteLine("Start Rx thread..."); rxThread = new Thread(new ThreadStart(RXThread)); rxThread.Start(); // User information Console.WriteLine("Press <ENTER> to transmit CAN messages \n <b>, <ENTER> to block Rx thread for rx-overrun-test \n <B>, <ENTER> burst of CAN TX messages \n <x>, <ENTER> to exit"); // Transmit CAN data while (true) { if (blockRxThread)Console.WriteLine("Rx thread blocked."); // Read user input string str = Console.ReadLine(); if (str == "b")blockRxThread = !blockRxThread; else if (str == "B") { for (int i = 0; i < 1000; i++) { // Burst of CAN frames CANFDTransmitDemo(); } } else if (str == "x") break; else { // Send CAN frames CANFDTransmitDemo(); } } // Kill Rx thread rxThread.Abort(); Console.WriteLine("Close Port : " + CANDemo.XL_ClosePort(portHandle)); Console.WriteLine("Close Driver : " + CANDemo.XL_CloseDriver()); return 0; } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// Error message/exit in case of a functional call does not return XL_SUCCESS /// </summary> // ----------------------------------------------------------------------------------------------- private static int PrintFunctionError() { Console.WriteLine("\nERROR: Function call failed!\nPress any key to continue..."); Console.ReadKey(); return -1; } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// Displays the Vector Hardware Configuration. /// </summary> // ----------------------------------------------------------------------------------------------- private static void PrintConfig() { Console.WriteLine("\n\nAPPLICATION CONFIGURATION"); foreach (int channelIndex in new int[] { txCi, rxCi }) { Console.WriteLine("-------------------------------------------------------------------"); Console.WriteLine("Configured Hardware Channel : " + driverConfig.channel[channelIndex].name); Console.WriteLine("Hardware Driver Version : " + CANDemo.VersionToString(driverConfig.channel[channelIndex].driverVersion)); Console.WriteLine("Used Transceiver : " + driverConfig.channel[channelIndex].transceiverName); } Console.WriteLine("-------------------------------------------------------------------\n"); } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// Error message if channel assignment is not valid. /// </summary> // ----------------------------------------------------------------------------------------------- private static void PrintAssignErrorAndPopupHwConf() { Console.WriteLine("\nPlease check application settings of \"" + appName + " CAN1/CAN2\",\nassign it to available hardware channels and press enter."); CANDemo.XL_PopupHwConfig(); Console.ReadKey(); } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// Retrieve the application channel assignment and test if this channel can be opened /// </summary> // ----------------------------------------------------------------------------------------------- private static bool GetAppChannelAndTestIsOk(uint appChIdx, ref UInt64 chMask, ref int chIdx) { XLDefine.XL_Status status = CANDemo.XL_GetApplConfig(appName, appChIdx, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN); if (status != XLDefine.XL_Status.XL_SUCCESS) { Console.WriteLine("XL_GetApplConfig : " + status); PrintFunctionError(); } chMask = CANDemo.XL_GetChannelMask(hwType, (int)hwIndex, (int)hwChannel); chIdx = CANDemo.XL_GetChannelIndex(hwType, (int)hwIndex, (int)hwChannel); if (chIdx < 0 || chIdx >= driverConfig.channelCount) { // the (hwType, hwIndex, hwChannel) triplet stored in the application configuration does not refer to any available channel. return false; } if ((driverConfig.channel[chIdx].channelBusCapabilities & XLDefine.XL_BusCapabilities.XL_BUS_ACTIVE_CAP_CAN) == 0) { // CAN is not available on this channel return false; } if (canFdModeNoIso > 0) { if ((driverConfig.channel[chIdx].channelCapabilities & XLDefine.XL_ChannelCapabilities.XL_CHANNEL_FLAG_CANFD_BOSCH_SUPPORT) == 0) { Console.WriteLine("{0} ({1}) does not support CAN FD NO-ISO", driverConfig.channel[chIdx].name.TrimEnd(' ', '\0'), driverConfig.channel[chIdx].transceiverName.TrimEnd(' ', '\0')); return false; } } else { if ((driverConfig.channel[chIdx].channelCapabilities & XLDefine.XL_ChannelCapabilities.XL_CHANNEL_FLAG_CANFD_ISO_SUPPORT) == 0) { Console.WriteLine("{0} ({1}) does not support CAN FD ISO", driverConfig.channel[chIdx].name.TrimEnd(' ', '\0'), driverConfig.channel[chIdx].transceiverName.TrimEnd(' ', '\0')); return false; } } return true; } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// Sends some CAN messages. /// </summary> // ----------------------------------------------------------------------------------------------- public static void CANFDTransmitDemo() { XLDefine.XL_Status txStatus; // Create an event collection with 2 messages (events) XLClass.xl_canfd_event_collection xlEventCollection = new XLClass.xl_canfd_event_collection(1); // event 1 xlEventCollection.xlCANFDEvent[0].tag = XLDefine.XL_CANFD_TX_EventTags.XL_CAN_EV_TAG_TX_MSG; xlEventCollection.xlCANFDEvent[0].tagData.canId = 0x100; xlEventCollection.xlCANFDEvent[0].tagData.dlc = XLDefine.XL_CANFD_DLC.DLC_CAN_CANFD_8_BYTES; xlEventCollection.xlCANFDEvent[0].tagData.msgFlags = XLDefine.XL_CANFD_TX_MessageFlags.XL_CAN_TXMSG_FLAG_BRS | XLDefine.XL_CANFD_TX_MessageFlags.XL_CAN_TXMSG_FLAG_EDL; xlEventCollection.xlCANFDEvent[0].tagData.data[0] = 1; xlEventCollection.xlCANFDEvent[0].tagData.data[1] = 1; xlEventCollection.xlCANFDEvent[0].tagData.data[2] = 2; xlEventCollection.xlCANFDEvent[0].tagData.data[3] = 2; xlEventCollection.xlCANFDEvent[0].tagData.data[4] = 3; xlEventCollection.xlCANFDEvent[0].tagData.data[5] = 3; xlEventCollection.xlCANFDEvent[0].tagData.data[6] = 4; xlEventCollection.xlCANFDEvent[0].tagData.data[7] = 4; //// event 2 //xlEventCollection.xlCANFDEvent[1].tag = XLDefine.XL_CANFD_TX_EventTags.XL_CAN_EV_TAG_TX_MSG; //xlEventCollection.xlCANFDEvent[1].tagData.canId = 0x200; //xlEventCollection.xlCANFDEvent[1].tagData.dlc = XLDefine.XL_CANFD_DLC.DLC_CANFD_64_BYTES; //xlEventCollection.xlCANFDEvent[1].tagData.msgFlags = XLDefine.XL_CANFD_TX_MessageFlags.XL_CAN_TXMSG_FLAG_BRS | XLDefine.XL_CANFD_TX_MessageFlags.XL_CAN_TXMSG_FLAG_EDL; //xlEventCollection.xlCANFDEvent[1].tagData.data[0] = 7; //xlEventCollection.xlCANFDEvent[1].tagData.data[1] = 7; //xlEventCollection.xlCANFDEvent[1].tagData.data[2] = 8; //xlEventCollection.xlCANFDEvent[1].tagData.data[3] = 8; //xlEventCollection.xlCANFDEvent[1].tagData.data[4] = 9; //xlEventCollection.xlCANFDEvent[1].tagData.data[5] = 9; //xlEventCollection.xlCANFDEvent[1].tagData.data[6] = 3; //xlEventCollection.xlCANFDEvent[1].tagData.data[7] = 2; //xlEventCollection.xlCANFDEvent[1].tagData.data[8] = 1; //xlEventCollection.xlCANFDEvent[1].tagData.data[63] = 9; for (int i = 0; i < 10; i++) { // Transmit events uint messageCounterSent = 0; txStatus = CANDemo.XL_CanTransmitEx(portHandle, txMask, ref messageCounterSent, xlEventCollection); Console.WriteLine("Transmit Message ({0}) : " + txStatus, messageCounterSent); } } // ----------------------------------------------------------------------------------------------- // ----------------------------------------------------------------------------------------------- /// <summary> /// EVENT THREAD (RX) /// /// RX thread waits for Vector interface events and displays filtered CAN messages. /// </summary> // ----------------------------------------------------------------------------------------------- public static void RXThread() { // Create new object containing received data XLClass.XLcanRxEvent receivedEvent = new XLClass.XLcanRxEvent(); // Result of XL Driver function calls XLDefine.XL_Status xlStatus = XLDefine.XL_Status.XL_SUCCESS; // Result values of WaitForSingleObject XLDefine.WaitResults waitResult = new XLDefine.WaitResults(); // Note: this thread will be destroyed by MAIN while (true) { // Wait for hardware events waitResult = (XLDefine.WaitResults)WaitForSingleObject(eventHandle, 1000); // If event occurred... if (waitResult != XLDefine.WaitResults.WAIT_TIMEOUT) { // ...init xlStatus first xlStatus = XLDefine.XL_Status.XL_SUCCESS; // afterwards: while hw queue is not empty... while (xlStatus != XLDefine.XL_Status.XL_ERR_QUEUE_IS_EMPTY) { // ...block RX thread to generate RX-Queue overflows while (blockRxThread) Thread.Sleep(1000); // ...receive data from hardware. xlStatus = CANDemo.XL_CanReceive(portHandle, ref receivedEvent); // If receiving succeed.... if (xlStatus == XLDefine.XL_Status.XL_SUCCESS) { Console.WriteLine(CANDemo.XL_CanGetEventString(receivedEvent)); } } } // No event occurred } } // ----------------------------------------------------------------------------------------------- } }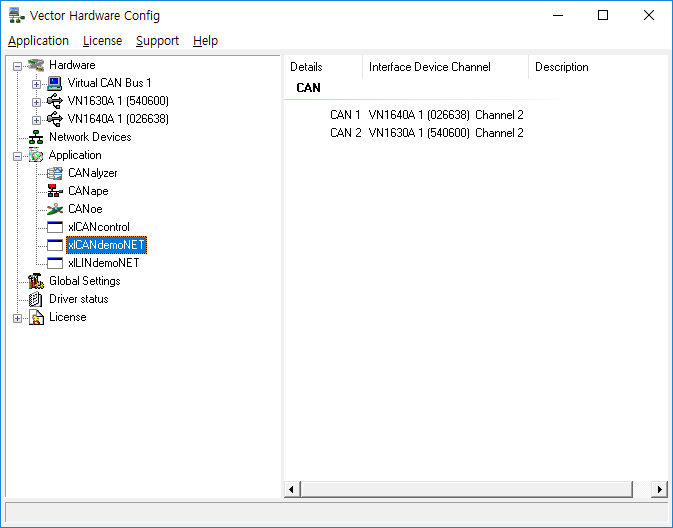
Vector Hardware Configuration 설정값 
VN1630A, VN1640A 두 기기는 각각 채널2에 연결된 모습을 볼 수 있습니다.
'C# > XL_Driver' 카테고리의 다른 글
BRS, ISO 값 설정하기 (1) 2020.02.19 TODO (0) 2020.02.10 6. 채널 정보 출력 2 ☆보완필요☆ (0) 2020.02.05 5. 채널 정보 출력 (0) 2020.02.05 4. channelCount (0) 2020.02.05